The Transition to the Real-World Running Resistance
[TECHNICAL PAPER]
Urgell, Xavier (*); Martí, Alejandro; Bertomeu, Judith; Maroto, Pedro; Garbí, Alba; Gascón, Albert
Applus+ IDIADA, Spain
KEYWORDS – Energy, running resistance, real-world, vehicle, cornering, asphalt, traffic, aerodynamics, wind, coast-down
INTRODUCTION
Tremendous efforts have been made for Worldwide harmonized Light duty vehicles Test Procedures (WLTP) standardization with respect to emissions and energy consumption measurements. Regarding vehicle running resistance evaluation, the current standard (EU) 2017/1151 [1] provides an accurate and robust methodology for measuring the road load models, more popularly known as coast-downs. In order to ensure the repeatability of the results, the coast-down must be measured under highly controlled and representative conditions. All vehicle factors, such as aerodynamic drag, mechanical drag and tire rolling resistance drag are part of the coast-down.
However, in the real world, several additional factors can increase the driving energy demand more than the vehicle driving energy demand deducted from the coast-down. These factors are the cornering, the wind, the gradient, the traffic conditions and the asphalt. The gap between the coast-down and the real world may also be different depending on powertrain architecture and driving style.
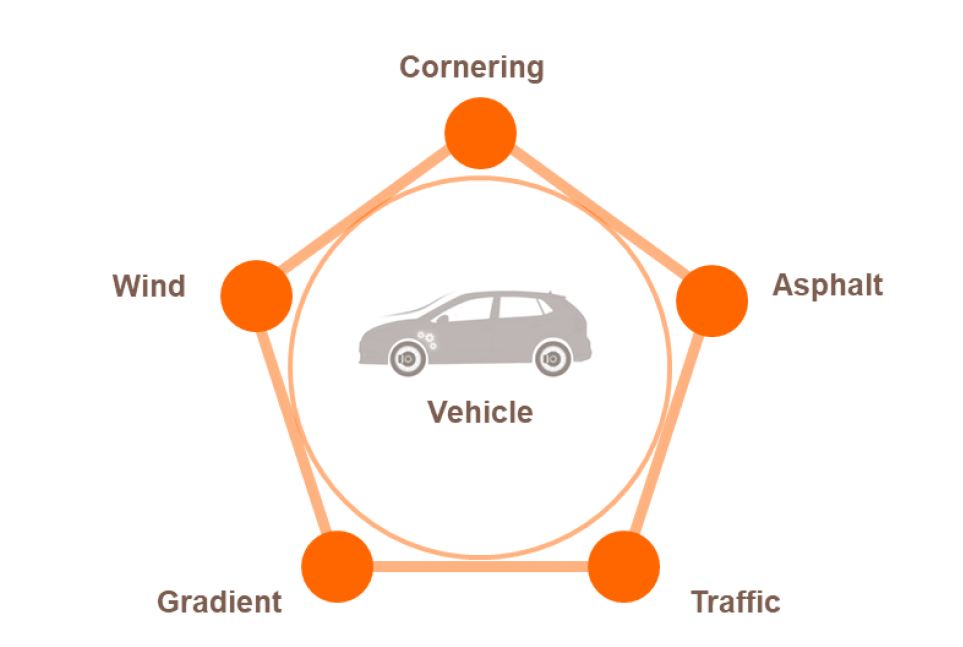
Figure 1 - Real-world running resistance factors
This technical paper will describe these factors and will estimate the additional driving energy demand due to the real-world approach for a single case.
METHODS
A test vehicle equipped with numerous sensors has been used for traveling two official RDE routes while collecting the necessary data for evaluating the additional energy demand for every factor.
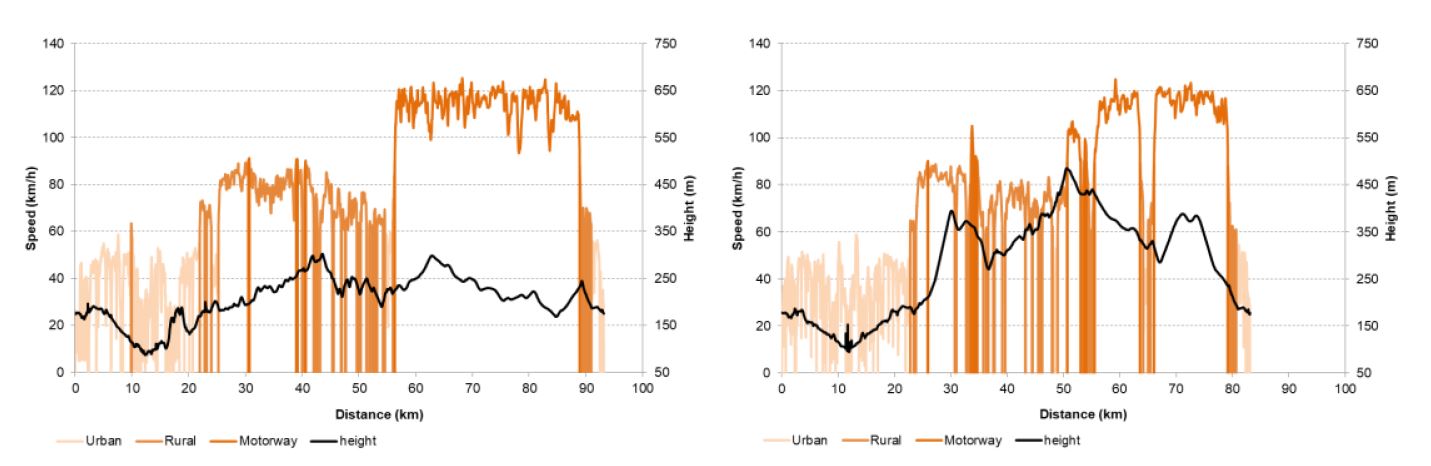
Figure 2 – Real Driving Energy routes A and B
The length of each route is approximately 100 km and the driving energy demand attributed exclusively to vehicle factors can be calculated based on the coast-down and the speed profile. The driving energy demand due to the inertia has been omitted and assumed as a combination of the gradient and load.
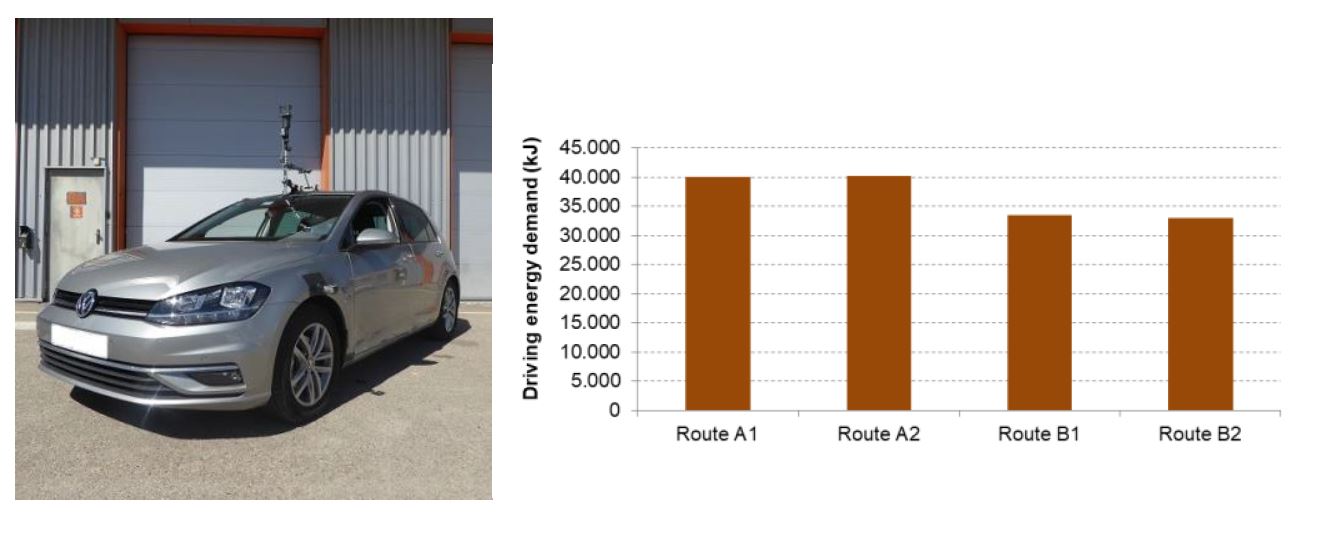
Figure 3 – Test vehicle and driving energy demand
Cornering
The fastest way to go from point A to point B assumes a constant speed travel on a straight line. However, during our daily commuting we need to change the vehicle direction with the steering wheel due to the road infrastructure. Thus, we must change the approach to assume that very rarely we travel in a straight line from A to B. Since the coast-down is measured on a straight line, supplementary driving energy requirements will be needed in the real world due to the cornering efforts. Currently the chassis dynamometer driving cycles are tested as if the vehicle goes on a straight line, while in the open road tests the driver undergoes constant changes of direction.
If the vehicle follows a curved path, the angular velocity (with respect to the center of the curve) to which the vehicle moves, will cause a centrifugal acceleration that the tires will have to counteract. These tires, apart from the traction and friction longitudinal forces (caused by linear speeds), will have to withstand traction and friction lateral forces (caused by angular velocities). Using this reasoning as a basis, it can be analyzed how these extra forces generate extra effort that ultimately results in extra consumption.
In this study, the tire deviations higher than three degrees have been considered as curved trajectories. So, very small radius of curvature has been neglected. The additional driving energy demand due to cornering has been calculated based on the vehicle lateral acceleration measurement during cornering. Using these limits and methods, the following result has been obtained:
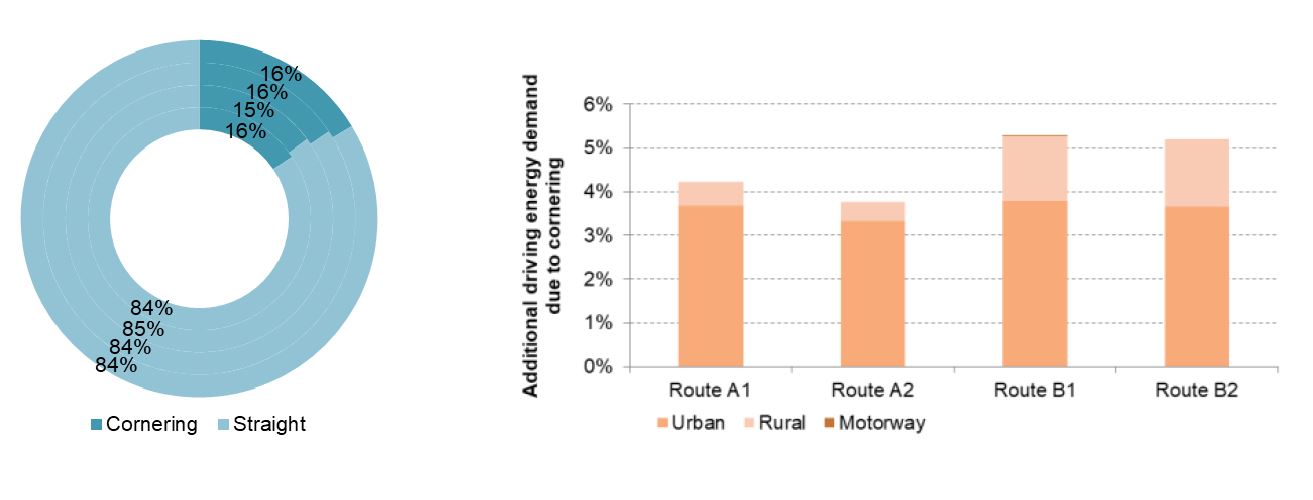
Figure 4 – Cornering ratio and additional driving energy demand due to cornering
Asphalt
When considering real-world running resistance, we come directly to real-world rolling resistance. This is a consequence of the interaction between tires and asphalt. Different surface and tire characteristics will lead to differences in the rolling resistance. Since the coast-down test is performed on a normalized and representative pavement, it is assumed that the different pavements encountered in the real world will modify the rolling resistance coefficient between tire and asphalt.
Tire and asphalt interact at different levels while rolling, which means differentiating micro texture; macro texture and mega texture (see Figure 5). It has been observed that these wavelength levels
contribute to the rolling resistance in different magnitudes having an impact on the total energy demand of the vehicle.
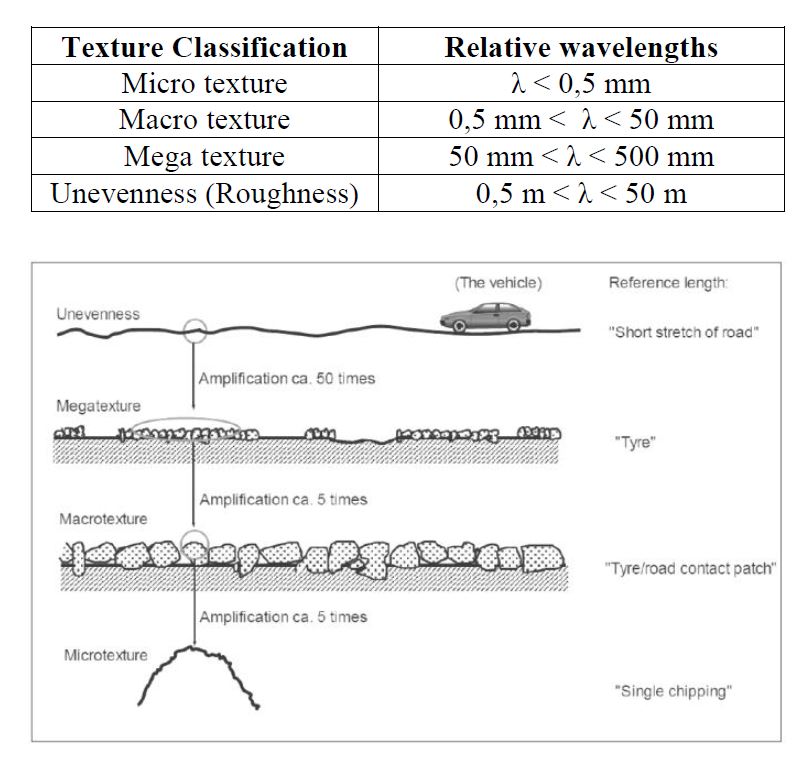
Figure 5 – Texture classification [2]
The microtexture is too small to be observed by the eye and is caused by the different sharpness of the individual particles on the top part of the surface, directly in contact with the tires. Microtexture provides the tire-wearing and influences the friction between tire and asphalt.
Macrotexture properties are mostly designed to obtain a good water drainage. Together with the microtexture, they determine the pavement friction. In high wavelengths their influence has also been observed on the rolling resistance of the vehicle.
The megatexture always has a negative impact on the rolling resistance of a vehicle, as well as on the comfort. The texture in this wavelength is caused by distresses and inadequate compaction of the surface [1]. When considering unevenness, it is logical to assume the direct influence of it on the energy demand of a vehicle.
On a route with different types of roads (motorway, rural, urban) differences between asphalts can be appreciated at a glance. A technology exists that permits the quantification and analysis of differences of micro-, macro, and mega-texture between different surfaces. This is the power spectral density analysis:
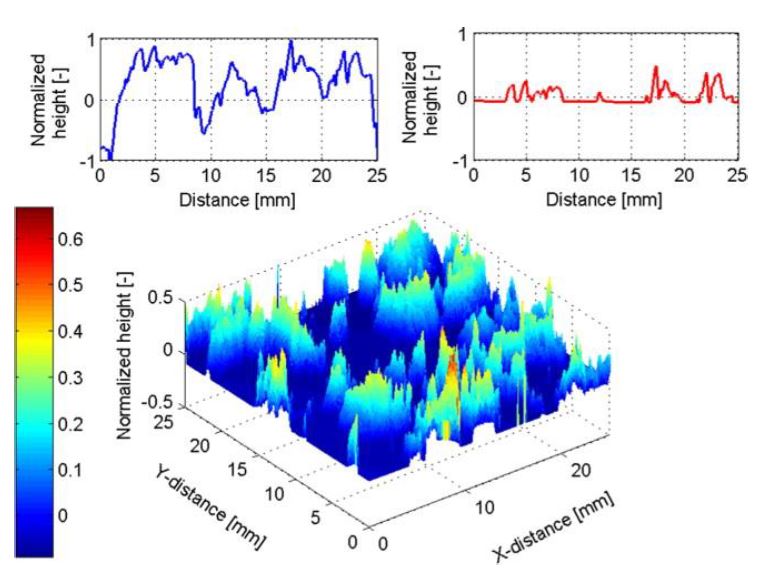
Figure 6 - Power spectral density analysis [3]
The power spectral density of the surface roughness can be defined as [3]:

Where, as described by L.Hartikainen, F.Petry and S.Westermann [3], x is a two-dimensional vector in the mean plane of the surface and q is a two-dimensional wave vector, or spatial frequency. The corresponding wavelength for each value of q can be calculated as 2π/q. The C(q) function is essentially the Fourier transform of the autocorrelation function of the surface height data.
Using a proper sensor, vehicle pitch angle can be used for identifying the relative height alongside the route in order to analyze the unevenness:
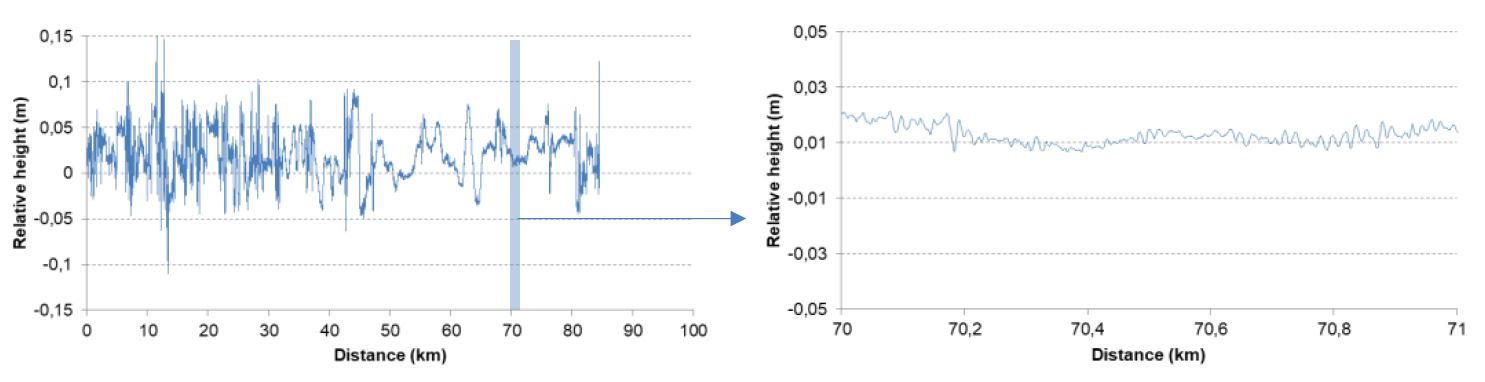
Figure 7 – Relative height
The roughness observed on the different pavements leads to different friction coefficient values, having a direct influence on the tires’ adherence. This adherence, even if necessary in terms of safety, directly affects the energy demand of the vehicle.
Gradient
In the context of real-world running resistance, road gradient plays a major role in terms of road load. The presence of road gradient implies an additional load to be overcome by the vehicle. The extra load as a consequence of the road gradient is described in equation 2, where is the mass, is the gravity and is the slope:

Equation 2 describes road gradient as an extra load to be covered by the powertrain. However, road gradient can be studied from an energetic point of view. The energy that the vehicle spends to overcome an uphill gradient is not lost. This energy is stored in the form of potential energy. Therefore, it could be potentially recovered during downhill. For this reason, in a circular trip that starts and ends at the same altitude, the cumulated gradient energy is null.
The idea of recovering the potential energy during downhill leads us to differentiate between two different powertrain technologies: conventional powertrain with internal combustion engine and electrified powertrains (EV, PHEV, HEV). Only electrified powertrains have the capability of recovering the potential energy through regenerative braking.
According to the ideas previously presented, the potential energy involved during downhill could be invested as follows:
- Overcoming drags (engine drags, transmission drags, etc.)
- Recovering part of the energy by regenerative braking
- Increasing kinetic energy
As discussed, road gradient is an important factor when reproducing real world road load. In order to go from simulation to real application, a proper measurement methodologies and equipment have to be considered:
- GPS: It is probably the most used application when measuring speed and altitude. However, GPS has normally low precision in “Z” measurements and presents discontinuities in roads with tunnels.
- Vehicle inclinometer: It is a good complement to GPS measurements. The main drawback of this measurement system is that it is sensitive to suspension changes (strong accelerations, weight distribution, road bumps, etc…)
- Cartography road maps: maps data base is for sure another information source. GPS positioning can be used to acquire altitude information in maps applications. The problem is that normally the precision is not good enough. Small deviation in XY position could lead to big altitude errors in mountain areas.
Straightforward measurement devices seem not to fulfil completely the needs for road gradient measurement. The instrumentation described above provides noisy measurement and lead to inaccuracies. For this reason, the best solution found in the industry is to develop Kalman filters.
Wind
One could say that driving a vehicle is like swimming through an “air ocean”. In our daily routines, we do not see this air, but it is there, and it needs to be pushed out of the way for our vehicle to keep moving forward. This air is sent in all possible directions and as a consequence of Newton’s 3rd Law (for every action, there is an equal and opposite reaction), aerodynamic forces are applied to our vehicle.
Unfortunately, ground vehicles not only travel through standing still air conditions and most of the time they are submitted to unsteady air conditions resulting from ambient phenomena (crosswinds, wind gusts, etc.), traffic and handling maneuvers, infrastructure characteristics and air density variation due to temperature or height. Therefore, the air conditions experienced by a vehicle are, in reality, the result of the vector combination of:
- the external wind velocity, and
- the changes in the fluid density
The rapidly increasing interest in real-world driving conditions is pushing OEMs to pay closer attention to such events in order to better predict energy consumption and the corresponding tailpipe emissions.
Traditionally, OEMs have always obtained the aerodynamic resistance of a vehicle at pure forward driving conditions. In wind tunnel tests, this is achieved by perfectly aligning the vehicle in the longitudinal direction with the incoming flow. In coast-down tests, this is ensured by performing such tests when wind is blowing below a certain threshold. The WLTP, for instance, has strict requirements concerning average wind speed throughout the test and instantaneous wind peaks.
Most wind tunnels already offer the option to rotate the model mounted in the test section and evaluate the vehicle aerodynamic response at different yaw angles and this is of key importance because all driving events listed above create a lateral wind component, which leads to drag coefficient values higher than those measured in wind tunnel or coast-down tests in straight ahead conditions. Windsor. S [5] measured, in wind tunnel, a drag coefficient increase between 5 and 11% over the range 0-5º in yaw for several saloon-type vehicles.
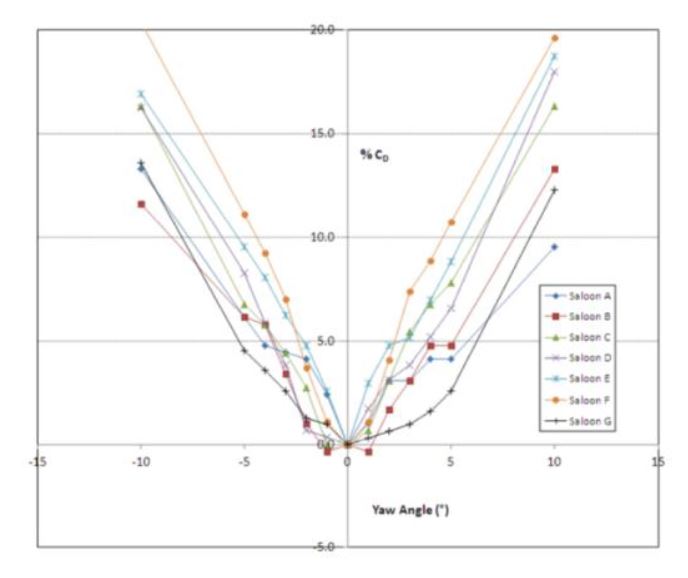
Figure 8. Saloon Car Yaw Response [5]
The shape of such yaw polar curves, besides affecting vehicle handling, also has a significant effect on energy consumption. As seen in Figure 8, the vehicle aerodynamic response to crosswinds is vehicle dependent and in order to better compare two different vehicles, from the aerodynamic perspective, a wind averaged drag coefficient, CDw-avg, is a common approach. There are several methods already documented for calculating this averaged coefficient [6] [7] [8]. While they all assume a fixed vehicle velocity, their differences lie in the weighting applied either to the wind speed or to the wind direction.
In this study, a standardized polar yaw curve has been combined with real time yaw angle measurement during the routes. Thus, the module and direction of the relative wind vector compared to the vehicle speed has been calculated. The effect of driving under non standardized air density conditions has also been considered in terms of additional aerodynamic drag compared to the coast-down reference. Using these limits and methods, the following result has been obtained in terms of additional driving energy demand due to the wind:
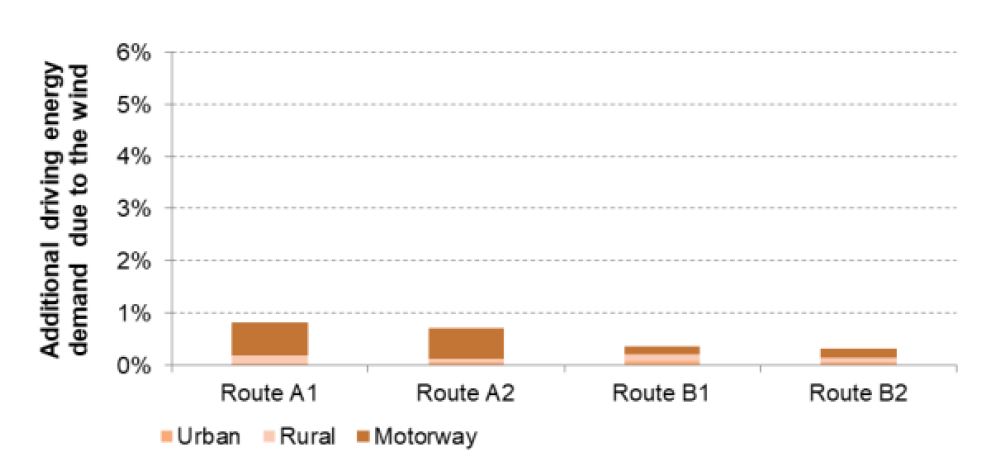
Figure 9. Additional driving energy demand due to the wind
Traffic
Unfortunately, ground vehicles not only travel through standing still air conditions and most of the time they are submitted to unsteady air conditions resulting from ambient phenomena, traffic and handling maneuvers (overtaking, passing each other, lane changes, driving behind other vehicles, etc.) or infrastructure characteristics (tunnel exit, bridges, etc.). Therefore, the air conditions experienced by a vehicle are, in reality, the result of the vector combination of:
- the oncoming flow velocity due to the vehicle in motion, and
- the external wind velocity
In fact, the driving energy demand is not the only issue affected by the air conditions experienced by a vehicle. The driver comfort perception is also sensitive to the body vibrations, especially in roll angle.
Thousands of events occurred during the driving routes. In order to evaluate the on-road turbulence, the test vehicle should have been equipped with an aero rake sensors set-up, such as multi-hole fast response unsteady probes for measuring high-frequency flow phenomena in the kHz range and not just in terms of a single measured parameter.

Figure 10. Motorway sample driving events
ther approaches have also been explored in order to quantify the on-road turbulence [9] [10], which differs significantly from the low turbulence levels one usually works with in wind tunnels, regardless of the yaw angle.
CONCLUSIONS
The transition to the real-world running resistance will be aligned with the effect on the driving energy demand of the cornering, the wind, the gradient, the traffic conditions and the asphalt.
- Cornering time was 15% of the total time during the evaluated route and the efforts in terms of supplementary energy demand represented the 5%. For this reason, analyzing the effect of the lateral efforts to minimize them is a key point to optimize the resistance impact of the moving vehicle.
- Asphalt is a common factor for millions of vehicles so this item has the highest improvement potential for the real-world energy reduction. However, driving energy demand reduction has to be well balanced with the pavement performance in terms of adherence and safety.
- Gradient itself is not a negative factor for the real-world running resistance. The optimization of the energy recovery due to regeneration of the electrified powertrains is the key issue for the driving energy demand minimization.
- Wind effect of the driving running resistance in terms of the additional energy was 1% for the measured vehicle. Of course, this effect is going to be proportional to the side wind speed and the routes were measured under low wind condition. The challenge of the yaw polar curves development will be crucial for the new vehicles energy reduction.
- Traffic condition affects both driving energy demand and driving comfort. Additional investigation work is recommended on this topic in order to quantify the impact on energy of the multiple driving events that happened on the real-world.
REFERENCES
[1] (EU) 2017/1151, « Type-approval of motor vehicles with respect to emissions from light passenger and commercial vehicles» Commission Regulation (EU), 1 of June 2017.
[2] L. Goubert, «State-of-the-art concerning texture influence on skid resistance, noise emission and rolling resistance,» 2014.
[3] F. P. S. W. L. Hartikainen, “Frequency-wise correlation of the power spectral density of asphalt surface roughness and tire wet friction,” in Wear, Volume 317, Issues 1–2, Pages 111-119,, 2014.
[4] Roche, M. and Mammetti, M., "An Innovative Vehicle Behaviour Modeling Methodology for Model-BasedDevelopment," SAE Technical Paper 2015-01-0165, 2015, doi:10.4271/2015-01-0165.
[5] S. Windor, «Real World Drag Coefficient - Is it Wind Averaged Drag?,» ResearchGate, October 2014.
[6] SAE-J1252, «SAE Wind Tunnel Test Procedure for Trucks and Buses,» SAE International, July 2012.
[7] MIRA Aerodynamic Wind Tunnel Facilities User's Handbook.
[8] K. Ingram, «The Wind Averaged Drag Coefficient Applied to Heavy Goods Vehicles,» Transport and Road Research Laboratory (TRRL) Supplementary Report 392, 1978.
[9] S. Wordley y J. Saunders, «On-road turbulence,» SAE Technical Paper Series, 2008-01-0475, 2008.
[10] S. Wordley y J. Saunders, «On-road turbulence. Part 2,» SAE Technical Paper Series, 2009-01-0002, 2009.