La transición a la resistencia al avance en el mundo real
Urgell, Xavier (*); Martí, Alejandro; Bertomeu, Judith; Maroto, Pedro; Garbí, Alba; Gascón, Albert
Applus+ IDIADA, España
PALABRAS CLAVE – Energía, resistencia al avance, mundo real, vehículo, toma de curvas, asfalto, tráfico, aerodinámica, viento, deceleración libre
[ARTÍCULO TÉCNICO]
INTRODUCCIÓN
Se han realizado enormes esfuerzos para la estandarización del Procedimiento Mundial Armonizado de Ensayos para Vehículos Ligeros (WLTP) en lo que respecta a las mediciones de emisiones y consumo energético. En cuanto a la evaluación de la resistencia al avance del vehículo, la norma actual (UE) 2017/1151 [1] proporciona una metodología precisa y robusta para medir los modelos de carga en carretera, más conocidos como deceleraciones libres (coast-downs). Para garantizar la repetibilidad de los resultados, la deceleración libre debe medirse bajo condiciones altamente controladas y representativas. Todos los factores del vehículo, como la resistencia aerodinámica, la resistencia mecánica y la resistencia a la rodadura de los neumáticos forman parte de la deceleración libre.
Sin embargo, en el mundo real, varios factores adicionales pueden incrementar la demanda energética de conducción más que la demanda energética del vehículo deducida de la deceleración libre. Estos factores son: la toma de curvas, el viento, la pendiente, las condiciones del tráfico y el asfalto. La diferencia entre la deceleración libre y el mundo real también puede variar según la arquitectura del sistema de propulsión y el estilo de conducción.
Figura 1 – Factores de resistencia al avance en el mundo real
Este artículo técnico describirá estos factores y estimará la demanda energética adicional de conducción debida al enfoque del mundo real para un caso particular.
MÉTODOS
Se ha utilizado un vehículo de prueba equipado con numerosos sensores para recorrer dos rutas RDE oficiales mientras se recopilaban los datos necesarios para evaluar la demanda energética adicional de cada factor.
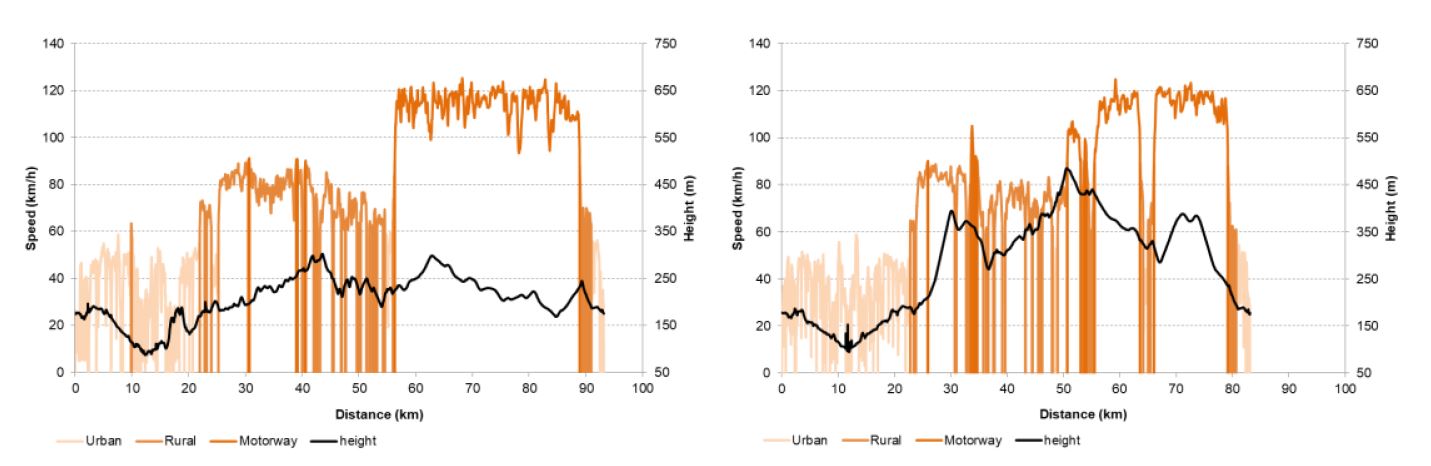
Figura 2 – Rutas de Energía de Conducción Real A y B
La longitud de cada ruta es de aproximadamente 100 km y la demanda energética de conducción atribuida exclusivamente a factores del vehículo puede calcularse basándose en la deceleración libre y el perfil de velocidad. La demanda energética de conducción debida a la inercia se ha omitido y se asume como una combinación de la pendiente y la carga.
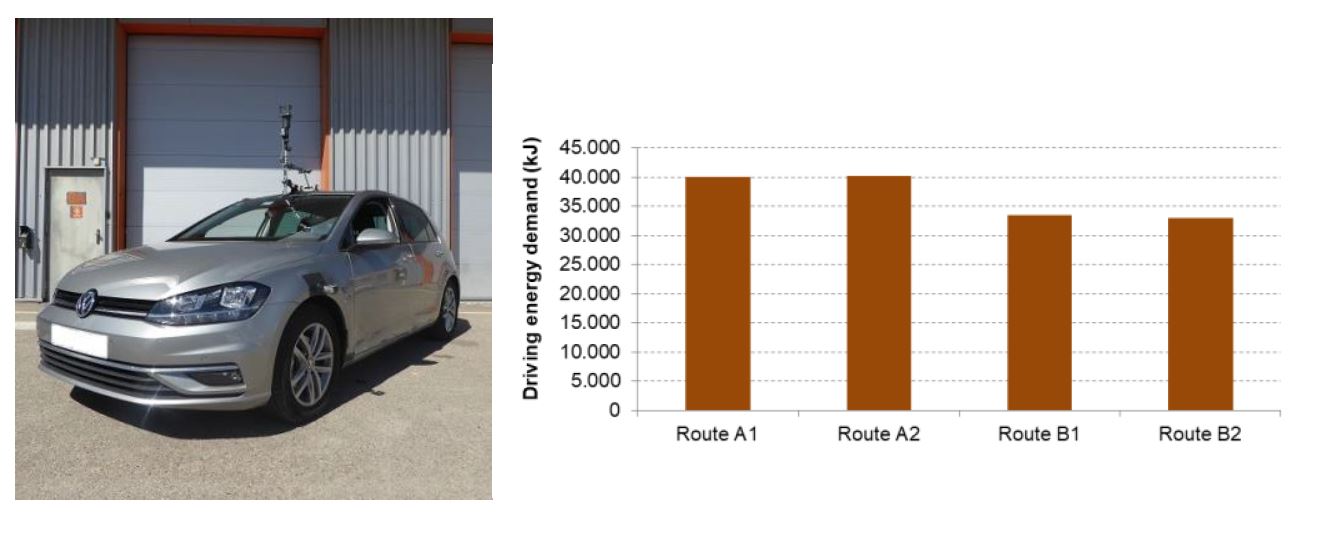
Figura 3 – Vehículo de prueba y demanda energética de conducción
Toma de curvas
La forma más rápida de ir del punto A al punto B supone un desplazamiento a velocidad constante en línea recta. Sin embargo, durante nuestros desplazamientos diarios necesitamos cambiar la dirección del vehículo con el volante debido a la infraestructura vial. Por tanto, debemos cambiar el enfoque para asumir que muy raramente viajamos en línea recta de A a B. Dado que la deceleración libre se mide en línea recta, se necesitarán requisitos energéticos suplementarios en el mundo real debido a los esfuerzos de toma de curvas. Actualmente, los ciclos de conducción en banco dinamométrico se ensayan como si el vehículo fuera en línea recta, mientras que en las pruebas en carretera abierta el conductor experimenta cambios constantes de dirección.
Si el vehículo sigue una trayectoria curva, la velocidad angular (con respecto al centro de la curva) a la que se mueve el vehículo causará una aceleración centrífuga que los neumáticos tendrán que contrarrestar. Estos neumáticos, además de las fuerzas longitudinales de tracción y fricción (causadas por velocidades lineales), tendrán que soportar fuerzas laterales de tracción y fricción (causadas por velocidades angulares). Utilizando este razonamiento como base, se puede analizar cómo estas fuerzas adicionales generan un esfuerzo extra que finalmente resulta en un consumo adicional.
En este estudio, las desviaciones de los neumáticos superiores a tres grados se han considerado como trayectorias curvas. Así, se han despreciado los radios de curvatura muy pequeños. La demanda energética adicional de conducción debida a la toma de curvas se ha calculado basándose en la medición de la aceleración lateral del vehículo durante las curvas. Utilizando estos límites y métodos, se ha obtenido el siguiente resultado:
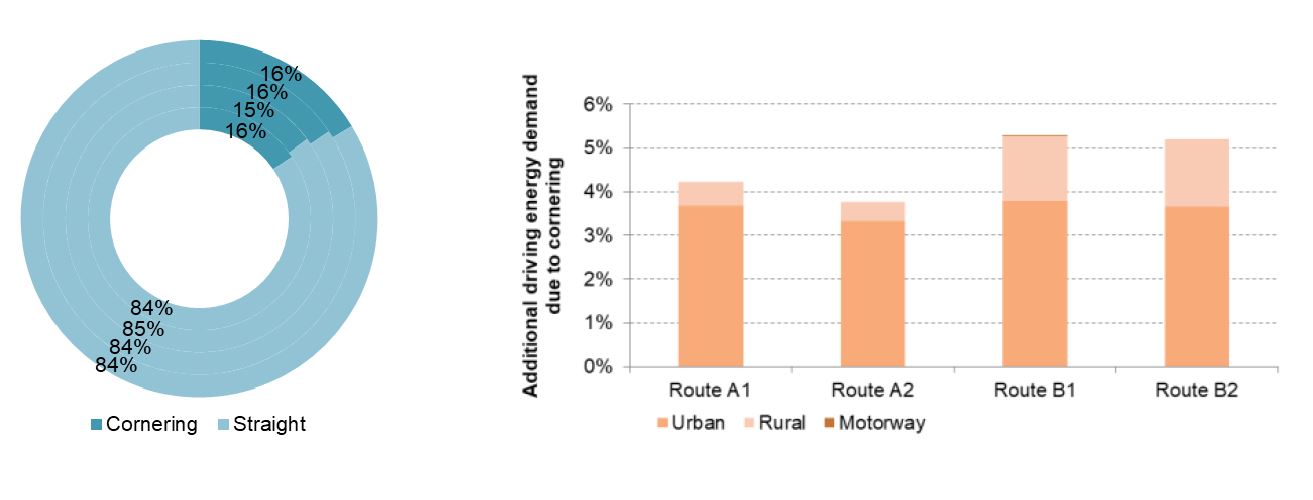
Figura 4 – Proporción de curvas y demanda energética adicional debido a la toma de curvas
Asfalto
Al considerar la resistencia al avance en el mundo real, llegamos directamente a la resistencia a la rodadura en el mundo real. Esta es una consecuencia de la interacción entre neumáticos y asfalto. Las diferentes características de superficie y neumático conducirán a diferencias en la resistencia a la rodadura. Dado que el ensayo de deceleración libre se realiza sobre un pavimento normalizado y representativo, se asume que los diferentes pavimentos encontrados en el mundo real modificarán el coeficiente de resistencia a la rodadura entre neumático y asfalto.
El neumático y el asfalto interactúan a diferentes niveles durante la rodadura, lo que significa diferenciar microtextura, macrotextura y megatextura (véase la Figura 5). Se ha observado que estos niveles de longitud de onda contribuyen a la resistencia a la rodadura en diferentes magnitudes, teniendo un impacto en la demanda energética total del vehículo.
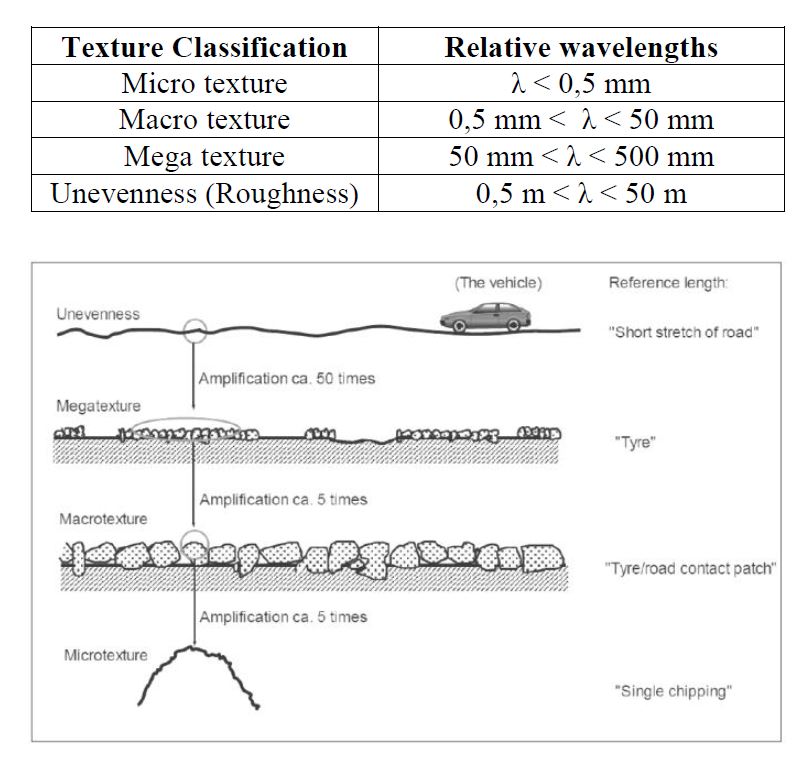
Figura 5 – Clasificación de texturas [2]
La microtextura es demasiado pequeña para ser observada a simple vista y está causada por las diferentes rugosidades de las partículas individuales en la parte superior de la superficie, directamente en contacto con los neumáticos. La microtextura proporciona el desgaste del neumático e influye en la fricción entre neumático y asfalto.
Las propiedades de la macrotextura están diseñadas principalmente para obtener un buen drenaje del agua. Junto con la microtextura, determinan la fricción del pavimento. En longitudes de onda altas, su influencia también se ha observado en la resistencia a la rodadura del vehículo.
La megatextura siempre tiene un impacto negativo en la resistencia a la rodadura de un vehículo, así como en el confort. La textura en esta longitud de onda está causada por deterioros y compactación inadecuada de la superficie [1]. Al considerar las irregularidades, es lógico asumir la influencia directa de las mismas en la demanda energética de un vehículo.
En una ruta con diferentes tipos de carreteras (autopista, rural, urbana) se pueden apreciar a primera vista las diferencias entre asfaltos. Existe una tecnología que permite la cuantificación y análisis de las diferencias de micro-, macro- y megatextura entre diferentes superficies. Esta es el análisis de densidad espectral de potencia:
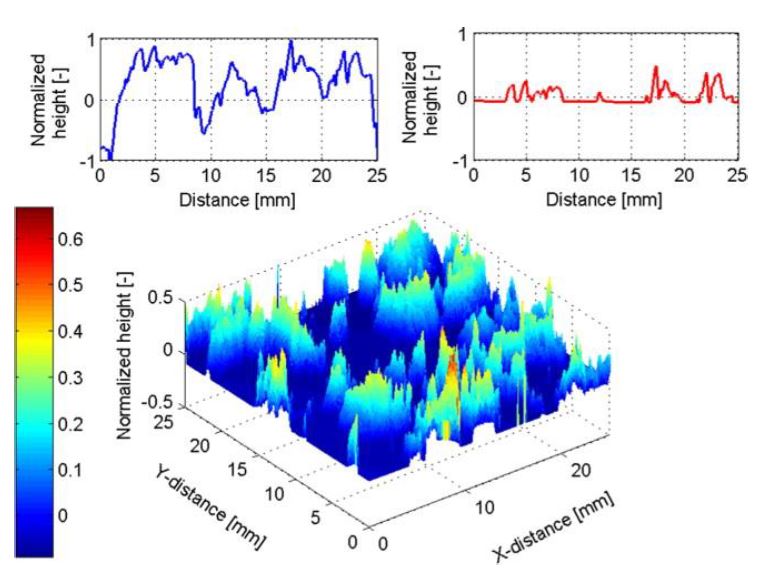
Figura 6 - Análisis de densidad espectral de potencia [3]
La densidad espectral de potencia de la rugosidad superficial puede definirse como [3]:

Donde, como describen L. Hartikainen, F. Petry y S. Westermann [3], x es un vector bidimensional en el plano medio de la superficie y q es un vector de onda bidimensional, o frecuencia espacial. La longitud de onda correspondiente para cada valor de q puede calcularse como 2π/q. La función C(q) es esencialmente la transformada de Fourier de la función de autocorrelación de los datos de altura de la superficie.
Utilizando un sensor apropiado, el ángulo de cabeceo del vehículo puede utilizarse para identificar la altura relativa a lo largo de la ruta con el fin de analizar las irregularidades:
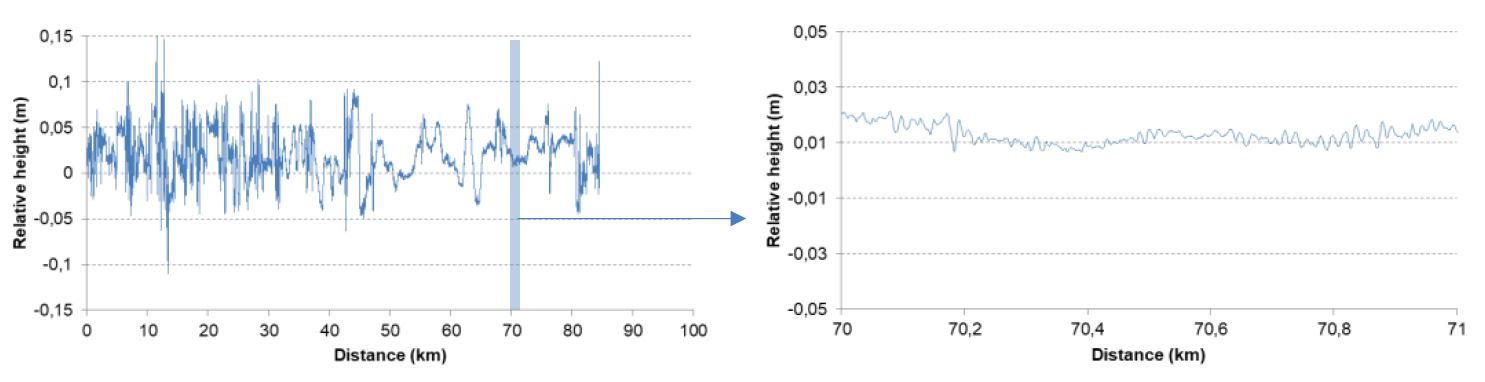
Figura 7 – Altura relativa
La rugosidad observada en los diferentes pavimentos conduce a diferentes valores del coeficiente de fricción, teniendo una influencia directa en la adherencia de los neumáticos. Esta adherencia, aunque necesaria en términos de seguridad, afecta directamente a la demanda energética del vehículo.
Pendiente
En el contexto de la resistencia al avance en el mundo real, la pendiente de la carretera juega un papel importante en términos de carga vial. La presencia de pendiente en la carretera implica una carga adicional que debe ser superada por el vehículo. La carga extra como consecuencia de la pendiente de la carretera se describe en la ecuación 2, donde m es la masa, g es la gravedad y α es la pendiente:

La ecuación 2 describe la pendiente de la carretera como una carga extra que debe ser cubierta por el sistema de propulsión. Sin embargo, la pendiente de la carretera puede estudiarse desde un punto de vista energético. La energía que el vehículo gasta para superar una pendiente ascendente no se pierde. Esta energía se almacena en forma de energía potencial. Por tanto, podría recuperarse potencialmente durante el descenso. Por esta razón, en un viaje circular que comienza y termina a la misma altitud, la energía acumulada de pendiente es nula.
La idea de recuperar la energía potencial durante el descenso nos lleva a diferenciar entre dos tecnologías de propulsión diferentes: sistema de propulsión convencional con motor de combustión interna y sistemas de propulsión electrificados (EV, PHEV, HEV). Solo los sistemas de propulsión electrificados tienen la capacidad de recuperar la energía potencial a través del frenado regenerativo.
Según las ideas presentadas anteriormente, la energía potencial involucrada durante el descenso podría invertirse de la siguiente manera:
- Superando resistencias (resistencias del motor, resistencias de transmisión, etc.)
- Recuperando parte de la energía mediante frenado regenerativo
- Aumentando la energía cinética
Como se ha discutido, la pendiente de la carretera es un factor importante al reproducir la carga vial del mundo real. Para pasar de la simulación a la aplicación real, deben considerarse metodologías de medición y equipos apropiados:
- GPS: Es probablemente la aplicación más utilizada al medir velocidad y altitud. Sin embargo, el GPS normalmente tiene baja precisión en mediciones "Z" y presenta discontinuidades en carreteras con túneles.
- Inclinómetro del vehículo: Es un buen complemento a las mediciones GPS. El principal inconveniente de este sistema de medición es que es sensible a cambios de suspensión (aceleraciones fuertes, distribución de peso, baches, etc.)
- Mapas cartográficos de carreteras: la base de datos de mapas es sin duda otra fuente de información. El posicionamiento GPS puede utilizarse para adquirir información de altitud en aplicaciones de mapas. El problema es que normalmente la precisión no es suficientemente buena. Pequeñas desviaciones en la posición XY podrían conducir a grandes errores de altitud en áreas montañosas.
Los dispositivos de medición directos parecen no cumplir completamente las necesidades para la medición de pendientes de carretera. La instrumentación descrita anteriormente proporciona mediciones ruidosas y conduce a inexactitudes. Por esta razón, la mejor solución encontrada en la industria es desarrollar filtros de Kalman.
Viento
Se podría decir que conducir un vehículo es como nadar a través de un "océano de aire". En nuestras rutinas diarias, no vemos este aire, pero está ahí, y necesita ser empujado fuera del camino para que nuestro vehículo siga avanzando. Este aire se envía en todas las direcciones posibles y como consecuencia de la 3ª Ley de Newton (para cada acción, hay una reacción igual y opuesta), se aplican fuerzas aerodinámicas a nuestro vehículo.
Desafortunadamente, los vehículos terrestres no solo viajan a través de condiciones de aire estático y la mayoría de las veces están sometidos a condiciones de aire inestables resultantes de fenómenos ambientales (vientos cruzados, ráfagas de viento, etc.), tráfico y maniobras de manejo, características de infraestructura y variación de densidad del aire debido a temperatura o altura. Por tanto, las condiciones del aire experimentadas por un vehículo son, en realidad, el resultado de la combinación vectorial de:
- la velocidad del viento externo, y
- los cambios en la densidad del fluido
El interés rápidamente creciente en las condiciones de conducción del mundo real está empujando a los OEMs a prestar mayor atención a tales eventos para predecir mejor el consumo energético y las correspondientes emisiones del tubo de escape.
Tradicionalmente, los OEMs siempre han obtenido la resistencia aerodinámica de un vehículo en condiciones de conducción puramente hacia adelante. En ensayos en túnel de viento, esto se logra alineando perfectamente el vehículo en la dirección longitudinal con el flujo entrante. En ensayos de deceleración libre, esto se asegura realizando tales ensayos cuando el viento sopla por debajo de cierto umbral. El WLTP, por ejemplo, tiene requisitos estrictos concernientes a la velocidad promedio del viento durante el ensayo y picos instantáneos de viento.
La mayoría de túneles de viento ya ofrecen la opción de rotar el modelo montado en la sección de ensayo y evaluar la respuesta aerodinámica del vehículo a diferentes ángulos de guiñada y esto es de importancia clave porque todos los eventos de conducción listados anteriormente crean un componente de viento lateral, lo que conduce a valores de coeficiente de resistencia más altos que aquellos medidos en túnel de viento o ensayos de deceleración libre en condiciones de avance recto. Windsor. S [5] midió, en túnel de viento, un aumento del coeficiente de resistencia entre 5 y 11% sobre el rango 0-5º en guiñada para varios vehículos tipo sedán.
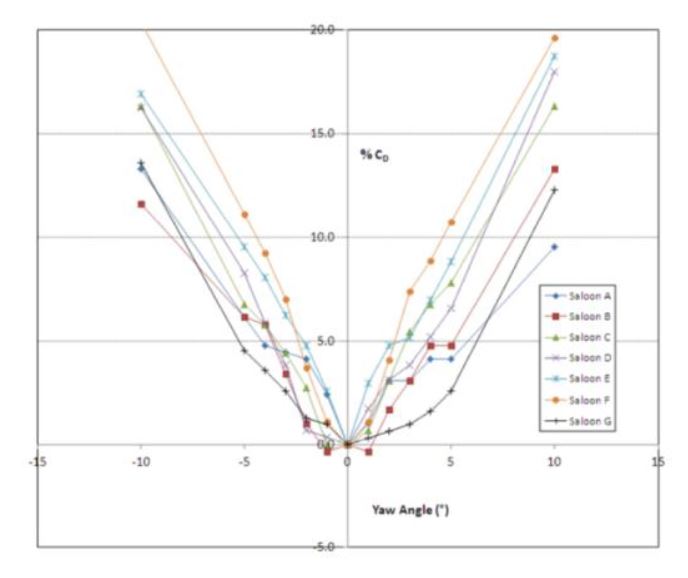
Figura 8. Respuesta de Guiñada de Automóvil Sedán [5]
La forma de tales curvas polares de guiñada, además de afectar el manejo del vehículo, también tiene un efecto significativo en el consumo energético. Como se ve en la Figura 8, la respuesta aerodinámica del vehículo a los vientos cruzados depende del vehículo y para comparar mejor dos vehículos diferentes, desde la perspectiva aerodinámica, un coeficiente de resistencia promediado por viento, CDw-avg, es un enfoque común. Ya existen varios métodos documentados para calcular este coeficiente promediado [6] [7] [8]. Aunque todos asumen una velocidad fija del vehículo, sus diferencias radican en la ponderación aplicada ya sea a la velocidad del viento o a la dirección del viento.
En este estudio, se ha combinado una curva polar de guiñada estandarizada con medición en tiempo real del ángulo de guiñada durante las rutas. Así, se ha calculado el módulo y dirección del vector de viento relativo comparado con la velocidad del vehículo. El efecto de conducir bajo condiciones de densidad del aire no estandarizadas también se ha considerado en términos de resistencia aerodinámica adicional comparada con la referencia de deceleración libre. Utilizando estos límites y métodos, se ha obtenido el siguiente resultado en términos de demanda energética adicional de conducción debido al viento:
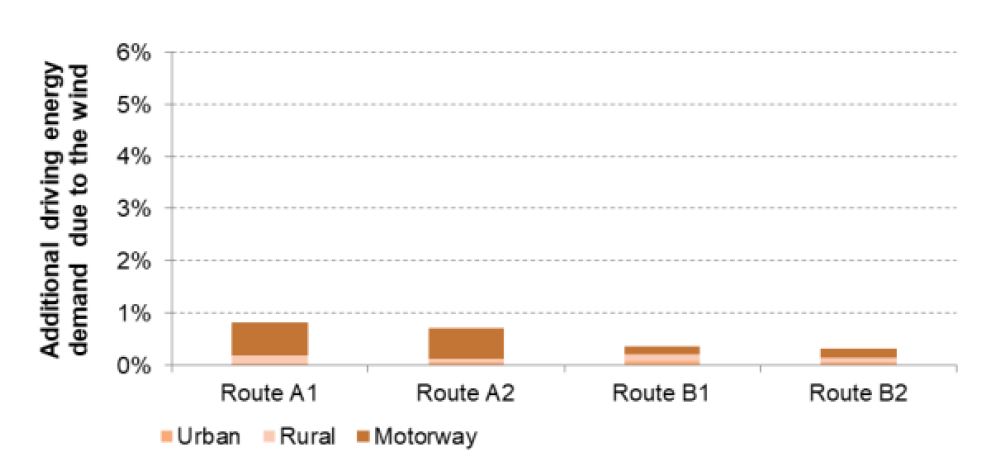
Figura 9. Demanda energética adicional de conducción debido al viento
Tráfico
Desafortunadamente, los vehículos terrestres no solo viajan a través de condiciones de aire estático y la mayoría de las veces están sometidos a condiciones de aire inestables resultantes de fenómenos ambientales, tráfico y maniobras de manejo (adelantamientos, cruzarse entre sí, cambios de carril, conducir detrás de otros vehículos, etc.) o características de infraestructura (salida de túnel, puentes, etc.). Por tanto, las condiciones del aire experimentadas por un vehículo son, en realidad, el resultado de la combinación vectorial de:
- la velocidad del flujo entrante debido al vehículo en movimiento, y
- la velocidad del viento externo
De hecho, la demanda energética de conducción no es el único problema afectado por las condiciones del aire experimentadas por un vehículo. La percepción de confort del conductor también es sensible a las vibraciones de la carrocería, especialmente en ángulo de balanceo.
Miles de eventos ocurrieron durante las rutas de conducción. Para evaluar la turbulencia en carretera, el vehículo de prueba debería haber estado equipado con una configuración de sensores de rastrillo aerodinámico, como sondas inestables de respuesta rápida multi-orificio para medir fenómenos de flujo de alta frecuencia en el rango de kHz y no solo en términos de un parámetro medido único.

Figura 10. Muestra de eventos de conducción en autopista
También se han explorado otros enfoques para cuantificar la turbulencia en carretera [9] [10], que difiere significativamente de los niveles de baja turbulencia con los que se trabaja habitualmente en túneles de viento, independientemente del ángulo de guiñada.
CONCLUSIONES
La transición a la resistencia al avance en el mundo real estará alineada con el efecto en la demanda energética de conducción de la toma de curvas, el viento, la pendiente, las condiciones del tráfico y el asfalto.
El tiempo de toma de curvas fue el 15% del tiempo total durante la ruta evaluada y los esfuerzos en términos de demanda energética suplementaria representaron el 5%. Por esta razón, analizar el efecto de los esfuerzos laterales para minimizarlos es un punto clave para optimizar el impacto de resistencia del vehículo en movimiento.
El asfalto es un factor común para millones de vehículos, por lo que este elemento tiene el mayor potencial de mejora para la reducción energética del mundo real. Sin embargo, la reducción de la demanda energética de conducción debe estar bien equilibrada con el rendimiento del pavimento en términos de adherencia y seguridad.
La pendiente en sí misma no es un factor negativo para la resistencia al avance en el mundo real. La optimización de la recuperación energética debido a la regeneración de los sistemas de propulsión electrificados es el problema clave para la minimización de la demanda energética de conducción.
El efecto del viento en la resistencia al avance de conducción en términos de energía adicional fue del 1% para el vehículo medido. Por supuesto, este efecto va a ser proporcional a la velocidad del viento lateral y las rutas se midieron bajo condiciones de viento bajo. El desafío del desarrollo de curvas polares de guiñada será crucial para la reducción energética de los nuevos vehículos.
Las condiciones del tráfico afectan tanto a la demanda energética de conducción como al confort de conducción. Se recomienda trabajo de investigación adicional sobre este tema para cuantificar el impacto en la energía de los múltiples eventos de conducción que ocurren en el mundo real.
REFERENCIAS
[1] (EU) 2017/1151, « Type-approval of motor vehicles with respect to emissions from light passenger and commercial vehicles» Commission Regulation (EU), 1 of June 2017.
[2] L. Goubert, «State-of-the-art concerning texture influence on skid resistance, noise emission and rolling resistance,» 2014.
[3] F. P. S. W. L. Hartikainen, “Frequency-wise correlation of the power spectral density of asphalt surface roughness and tire wet friction,” in Wear, Volume 317, Issues 1–2, Pages 111-119,, 2014.
[4] Roche, M. and Mammetti, M., "An Innovative Vehicle Behaviour Modeling Methodology for Model-BasedDevelopment," SAE Technical Paper 2015-01-0165, 2015, doi:10.4271/2015-01-0165.
[5] S. Windor, «Real World Drag Coefficient - Is it Wind Averaged Drag?,» ResearchGate, October 2014.
[6] SAE-J1252, «SAE Wind Tunnel Test Procedure for Trucks and Buses,» SAE International, July 2012.
[7] MIRA Aerodynamic Wind Tunnel Facilities User's Handbook.
[8] K. Ingram, «The Wind Averaged Drag Coefficient Applied to Heavy Goods Vehicles,» Transport and Road Research Laboratory (TRRL) Supplementary Report 392, 1978.
[9] S. Wordley y J. Saunders, «On-road turbulence,» SAE Technical Paper Series, 2008-01-0475, 2008.