Intersection 2020 project: developing a methodology for testing Autonomous Emergency Braking (AEB) Systems
The Intersection 2020 project is a private research initiative driven by automotive industry members and led by IDIADA with the support of the Bundesanstalt für Straßenwesen (BASt). The project aimed to develop a methodology for testing the Autonomous Emergency Braking (AEB) Systems in a new and more challenging scenario: intersections, as the project name may give away.
The first part of the project was mainly focused on studying accidents that happen in Europe at different types of junction. From this accidentology study, the most common accidents were selected as the main test cases. These reflect typical situations in which a collision may happen. In the first scenario, a vehicle turns to the left, crossing an opposite direction lane while a vehicle is approaching through that lane, this is known as a Left Turn Across Path with a vehicle coming in the Opposite Direction or LTAP/OD. In the accidentology study it was found that the same situation but with a vehicle approaching from the side is common as well; that is known as a Left Turn Across Path Lateral Direction or LTAP/LD. Last but not least is the most common intersection crash, where, at a 90º crossing, two vehicles collide perpendicularly. Figures bellow help understand the scenario.
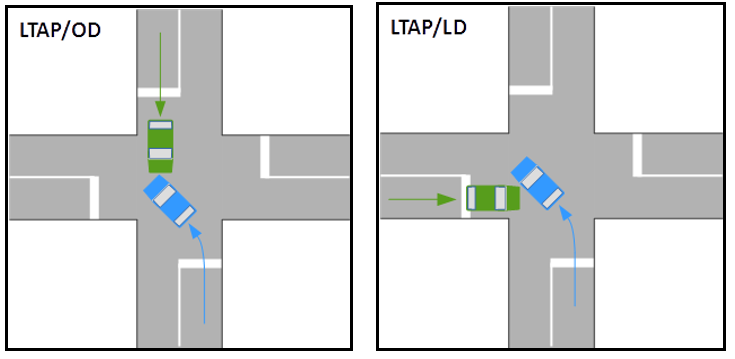
Figure 1: Most common scenarios
To develop an adequate testing methodology, accidentology data was compared with a statistical analysis of data recorded through a Naturalistic Driving Study (NDS). An NDS consists of having a sample of drivers drive through an open road route several times. In this specific case, the diving was done in urban, interurban and industrial areas, and the focus was on the input that each driver applied to the vehicle at each corner. By considering the results of both studies, we were able to get the required input for reproducing these accident situations on the test track. To do so, the data obtained is converted to driving robot input. These driving robots ensure the reproducibility of the tests. Driving robots are used in Advanced Driver Assistance Systems testing in order to mimic the behaviour of a driver in a reproducible way. Robots are installed in the steering wheel, in the accelerator pedal, and in the brake pedal. The figure below shows an example of a vehicle fully equipped with driving robots.

Figure 2: Example of vehicle equipped with driving robots
As the project was aligned with the Euro NCAP 2025 roadmap, the methodology developed during the project was presented to Euro NCAP in the AEB working group. Now, the project output can be found in the Euro NCAP 2020 AEB Car-to-Car protocol, the Car-to-Car Front turn across path (CCFtap). Moreover, through discussions, the project aligned with other R&D initiatives like the EU funded PROSPECT project, to help develop the methodology for testing AEB systems that focus on avoiding collisions with Vulnerable Road Users (VRU) at intersections, the Car-to-Pedestrian Turning Adult (CPTA). This alignment with PROSPECT also helped define the layout where both AEB VRU and AEB Car-to-Car are tested. In addition, a paper describing the technical process from which the testing parameters were obtained was submitted to the JSAE Congress.
All in all, IDIADA is proud of the outcome of the project and the knowledge gained from the work carried out in cooperation with 17 partners during the 2 years that the project has lasted. The project will have its official closing in September this year in a final event held on the new ADAS test track at IDIADA HQ. Moreover, a spin-off project has started where this one left off, to continue the work done for AEB testing at intersections, but also, to understand and develop a methodology for testing emergency steering systems and understanding and defining ways of mitigating the severity or even avoiding Head On accidents. This project is called EVADE 2022.
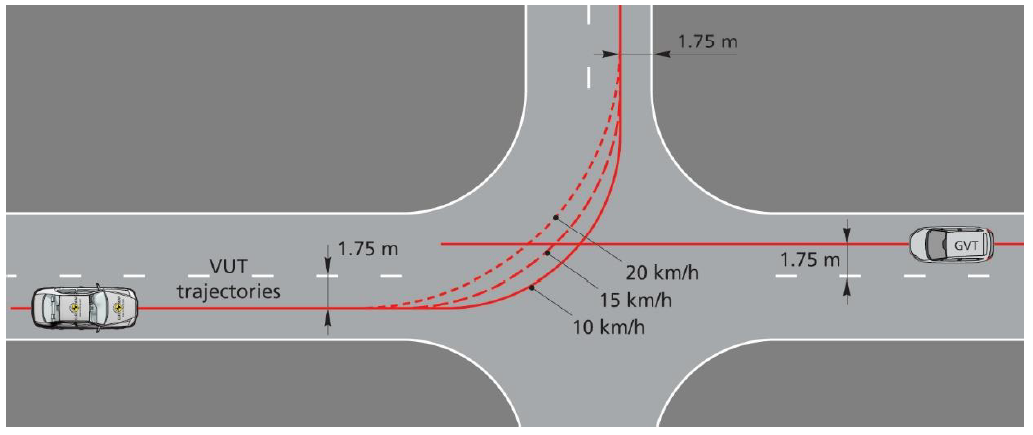
Figure 3: AEB CCFtap source: NCAP protocol 2020. VUT= Vehicle Under Test. GVT= Global Vehicle Target
We would like to acknowledge our project partners who made this project possible: Audi, BMW, Bosch, Continental, Daimler, Denso, Fiat Chrysler A., Hitachi, Honda R&D, PSA Group, Renault, Subaru, TME, Valeo, Veoneer, Volvo, ZF-TRW.