CAVRide project: an L4 automated taxi designed to navigate driverless within IDIADA´s headquarters
In response to the emerging needs of the automotive industry related to connected & automated vehicles, Applus+ IDIADA has utilised its development and validation expertise to engineer a level four autonomous vehicle that meets the necessary functional requirements to safely operate whilst keeping overall car performance. Under the name of CAVRide, the demonstration was to be presented as IDIADA’s flagship project at the Geneva International Motor Show 2020. Unfortunately, the worldwide Covid-19 pandemic forced the organisers to cancel the event.
Using a HEV production car as a base, the specialist CAVRide project development team designed and integrated an array of connected & automated vehicle supporting devices. Among them, the IDAPT, an in-house, multipurpose, on-board unit (IDIADA ADAS & CAV Platform Tool); a NVIDIA Drive PX2 computer platform for autonomous and driver assistance; as well as multiple perimeter surveillance sensors.
By combining sensors’ information and the processing of the captured data, the automated taxi is capable of predicting and understanding the road environment for safe driverless navigation within IDIADA’s headquarters.
Perception, Localization and Mapping
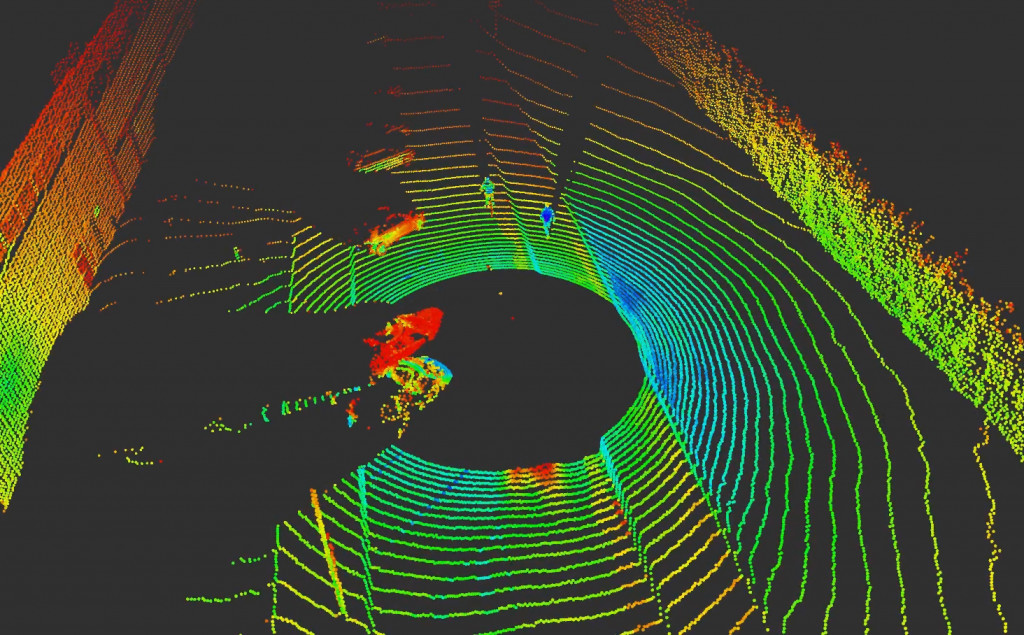
Perception algorithms allow the CAVRide to operate throughout IDIADA’s facilities thanks to the integration of several sensing devices such as LIDAR sensors and short-, medium- and long-range radars and cameras. Once the obtained data is combined, filtered and verified, the vehicle can interpret the traffic environment and predict other vehicles’ actions.
Planning and Control
Action prediction, behavioural and trajectory planning modules are combined to generate effective commands according to real-time traffic inputs, which will subsequently be sent to the control subsystem.
Connectivity and Cybersecurity
Connectivity between the user and the vehicle is becoming an ever-increasing key aspect for the mobility of tomorrow. Therefore, this subject played a major role in the development of the CAVRide project.
Passengers can call the taxi through a specifically designed app, which in turn provides information about the vehicle’s real position and the expected pick-up time. Once inside the taxi, passengers can interact with it through an interface, where they can select their destination, the preferred route, and take over the vehicle’s controls when needed.
Validation Testing
IDIADA’s validation engineers conducted both virtual and real driving testing procedures. On the one hand, IDIADA’s virtual specialists made use of an in-house driving simulator, together with a versatile and modular verification and validation framework, to analyse the outcome of the systems and subsystems involved in autonomous driving functions. An accurate CAVRide virtual model was exposed to a wide array of real traffic situations, which provided real-time data about the outcomes of the autonomous driving systems.
On the other hand, virtual testing was combined with exhaustive open-road and proving ground testing, completing an overall state-of-the-art validation methodology specifically intended for automated road transport. In doing so, the CAVRide’s on-board systems and subsystems were proved to satisfactorily comply with the expected autonomous driving functionalities, ensuring that the vehicle reacts safely to different hypothetical case scenarios.
Conclusion
This demonstration puts into practice all of IDIADA’s available theoretical knowledge, giving us the opportunity to confirm previous theories and learn new key aspects that, at the beginning of the project, were completely unknown.
The large team that have made this project a success – which includes engineers from dynamics, software, electrical and electronics areas, validation and testing, and experts in the fields of computer vision, localisation and control systems – worked in a coordinated and joint manner to develop the technology and establish the processes that will become the foundations of the services that IDIADA will be offering to its clients in the Autonomous Driving field.